
Servo Motor ve Servo Sürücüler
Servo motor, operatörün komutlarını yerine getirirek bir mekanizmada son kontrol elemanı olarak görev yapmaktadır. Bu komutlar, pozisyon ve hız komutları veya hız ve pozisyonun birleşimi olabilir. Servo motorun komutları uygulayabilmesi için bir sürücüye ihtiyacı vardı
1) DA Servo Sürücü
Doğru akımla çalışan sürücülerdir. Darbe genişlik modülasyonu (PWM) ile çalışan analog veya dijital sürücülerdir. Artırımlı enkoder veya tako jeneratör ile geri besleme yapılır. Ucuz ve kolay kullanımlı bir sürücü sistemidir.
2) AA Servo Sürücü
Alternatif akım ile çalışırlar. Sinüzoidal darbe genişlik modülasyonu ile çalışan, analog veya dijital yapıda sürücülerdir. Hall sensör veya çözümleyici artırımlı enkoder ile geri besleme yapılır. Kullanımı bilgi gerektiren AA servo sürücüler, DA sürücülerine göre daha yüksek performansa sahiptir ve DA sürücülere göre daha pahalıdır.
Geri Besleme Elemanlarının Seçimi
Sürücü kendisine gönderilen bilgileri motora iletir. Pozisyonun uygunluğu, hızın doğru olup olmadığını geri besleme elemanları ile kontrol edilir. Geri besleme elamanlarının, geri besleme olarak gönderdiği bilgiler:
► Resolver veya Sin-Cos enkoder
► Mutlak pozisyon ölçümü gereksinimi
► Artımlı encoder Yüksek hız çalışması
► Resolver veya enkoder Düşük hız çalışması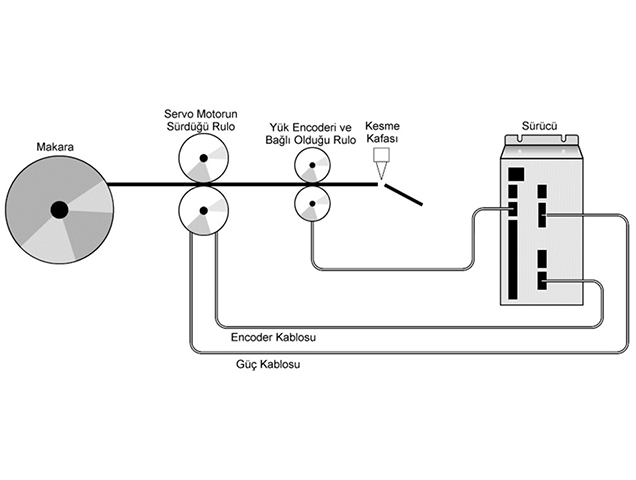
► Artımlı enkoder Doğruluk(hassasiyet )
► Resolver Yüksek sıcaklıkta çalışma
olarak sıralanmaktadır.
Resolver
► Pozisyon ölçümü için kullanılır
► Sisteme enerji verildiğinde direkt olarak pozisyon ölçümü yapar
► Yüksek sıcaklıkta çalışmaya uygundur
Artırımlı enkoder
► Yüksek çözünürlük ile hız ve pozisyon kontrolü
► Gürültüden arındırılmış
► RS422 ara devresi ile uzun mesafe çalışabilme
► 100oC maksimum çalışma sıcaklığı
Sin-Cos enkoder
► Mutlak değer ölçümü
► Sisteme enerji verildiğinde direkt olarak pozisyon ölçümü yapar
► 100oC maksimum çalışma sıcaklığı
Servo Sürücü Seçimi
Servo motor ve sürücü üretimi yapan firmalar kullanıcılara çeşitli seçenekler sunmaktadırlar. Kullanıcıların kolay bir şekilde motorları kullanabilmeleri için ayrı sürücüler, bu sürücüler içinse ayrı yazılımlar geliştirmişlerdir. Sistemde kullanılacak servo motorlar seçildikten sonra ona uygun servo sürücü ve yazılım seçilir.
Sürücü Haberleşme Protokolleri
Servo sürücüler teknolojinin gelişmesiyle daha akıllı hale geldiler. Açık ve kapalı çevrimde moment, hız, konum gibi temel kontrol fonksiyonlarının ilerisine geçip kullanıcıların sistemi devreye alması, işletme ve bakım kolaylıkları sağlayan, diğer sistemlerle iletişim kurabilen akıllı bir modüller halini almıştır.
Profibus, interbus, fieldbus ve CAN endüstriyel alanda kullanılan iletişim teknikleridir. Her üretici kendine özel protokoller kullanır. Firmalar arasında protokol farklılıkları olması, bir tesiste kullanılan farklı tipteki sürücülerin haberleşmesini engellemektedir. Bu durum farklı protokollerin haberleşme ihtiyacını ortaya çıkarmıştır.
Farklı protokollerin haberleşmesi, protokol dönüşümü ile yapılır. Ara bağlaşım elemanlarından ISO/OSI katmanlı yapının ikinci katında işlev gören “ KÖPRÜ” ile gerçekleştirilir. Köprü tasarımında elektronik elemanlar kullanılır. FPGA teknolojine aktarılan köprü tasarımı ile cihazlar küçülür, arıza ve montaj sırasındaki riskler azalır ve sistem performansı önemli ölçüde artar.
Üretim hattında birden çok sürücü olabilir. Sürücülerin birbiri ile uyumlu çalışması gerekmektedir. Gönderilen her bir bilgi için hat çekmek(paralel iletişim) yerine seri iletişim kullanılır. Buna seri haberleşme denir. Paralel iletişime göre daha ekonomiktir.
Bazı sistemlerde sürücülerin haberleşmesi gerekmemektedir. Bir sürücü (master) ve bunun ilk farklı istasyondaki giriş ve çıkış verilerinin merkeze iletilmesi amacıyla kullanılan yardımcı birimlerden (slave) oluşur. Bu yapıya BUS sistemi denir.
Günümüzde otomasyon alanında üretim yapan birçok firmanın ürettiği bir BUS sistemi vardır. Bu sistemleri birbirinden ayıran temel özellikler şunlardır:
► Veri ve kumanda hatlarının bağlanma şekli(ağaç, topoloji gb.)
► İletim hattı uzunluğu
► Veri iletim hızı ve hatasız veri iletimi
► Sensör, geri besleme gb. Elemanların sistem çalışırken değiştirilebilir olması